자동추진 농기계의 자율성 수준 분류에 관한 공학적 연구 남규철 1,김영주 2,3,*,김학진 4,5,정창우 4,김완수 2 * 해당저자 : *****@**.ac.kr 요약 도로 위 자동차 분야에서 자율주행 기술 수준은 SAE International이 제안한 J3016에 따라 정의된다. 그러나 농기계 분야에서는 자율주행 기술 수준별로 표준화된 분류 없이 국가와 제조사별로 다른 기준이 적용돼 농기계의 자율주행 기술을 명확히 정의하고 정확하게 평가하기 어렵다. 본 연구에서는 SAE International J3016을 개량하고 경작, 살포, 수확 등 다양한 농업 운영 특성을 보다 잘 보여주기 위해 자율농업기계(ALAAM)의 자율 수준을 분류하는 방법을 제안한다. ALAAM은 직선·곡선 경로 운전, 경로·실시 운영, 운영·환경 인식, 오류 대응, 농업업무 자동화 관련 항목별 운영자 및 자율시스템 개입 현황에 따라 0(수동)~5(완전자동화) 등 6단계로 분류한, 그리고 작업 구역 계획. ALAAM 분류의 핵심은 농기계 자동화를 위한 운영자와 자율시스템 간의 상대적 역할에 기반한다. 제안된 ALAAM은 자주식 농기계의 자율주행 수준을 분류하기 위한 표준 확립을 촉진할 것으로 기대됩니다. 키워드 : 농기계, 자율기술, 자율주행, 자율주행, 자율레벨분류 도입전 세계적으로 사용자의 편의성을 확보하고 운전 조작 개입을 최소화하기 위하여 차량의 자율주행 기술에 대한 관심이 지속적으로 높아지고 있다(Jeong et al., 2019). 자율주행 기술은 효율성이 높을 뿐만 아니라 운전자의 피로, 질병 등으로 인한 주의가 필요할 때 주행의 주요 기능을 담당함으로써 안전성을 확보할 수 있다는 이점이 있다(Fagnant and Kockelman, 2015). 이러한 자율주행 기술은 4차 산업혁명에 따라 인공지능, 빅데이터, 사물 인터넷, 고성능 센서 등과 같은 요소기술들의 개발 가속화로 인해 더욱 빠르게 개발되고 있다(An and Park, 2018; Kim et al., 2020b). 이때까지 자율주행 기술은 보급 대수가 가장 많고 산업 규모가 큰 자동차 분야에 활발히 적용되어 왔으나(Han et al., 2019a), 최근 자동차뿐만 아니라 건설기계 및 농업기계 등 다양한 산업분야에 확대되어 적용 중이다(Jeong and Cho, 2020; Kim et al., 2020a). 자율주행 기술이란 직접적인 수동 물리적 제어 또는 운전자의 감시 없이도 차량이 주행할 수 있도록 하는 기술을 의미하며, 자율주행 차량은 특정 자율주행 기술 레벨을 갖춘 차량을 의미한다(Lee et al., 2021). 자율주행 차량의 성능 및 안전 등을 평가하기 위해서는 차량에 장착된 자율주행시스템의 기술 수준을 동일한 지표를 통해 평가해야 하며, 이때 필요한 것이 자율주행 기술 레벨이다. 자동차 분야의 자율주행 기술의 레벨은 2013년 5월 미국 도로교통안전국(National Highway Traffic Safety Administration, NHTSA)에서 처음 제시 하였으며, 기술 레벨을 0부터 4까지 5단계로 구분하였다(NHTSA, 2013). NHTSA가 자율주행 기술 레벨을 제안할 당시에는 자율주행 기술이 구체적이지 않았으므로, 이를 보완하기 위하여 2016년 9월 국제자동차기술자협회(Society of Automotive Engineers International, SAE International)는 자율주행 표준 ‘SAE J3016’에서 자동차 분야의 자율주행 레벨을 0부터 5까지 6단계로 세분화하는 것을 제안하였다(SAE international, 2016): 1) Level 0: 비자동화, 2) Level 1: 운전자지원, 3) Level 2: 부분 자율주행, 4) Level 3: 조건부 자율주행, 5) Level 4: 고도 자율주행、 6) Level 5: 완전 이율 자동추진 농기계의 자율성 레벨 분류에 관한 공학적 연구 남규철1,김영주2,3,*,김학진4,5,정창우4,김완수2 * 해당저자 : ******@**.ac.kr 요약 도로 위 자동차 분야에서 자율주행 기술 수준은 SAE International이 제안한 J3016에 따라 정의된다. 그러나 농기계 분야에서는 자율주행 기술 수준별로 표준화된 분류 없이 국가와 제조사별로 다른 기준이 적용돼 농기계의 자율주행 기술을 명확히 정의하고 정확하게 평가하기 어렵다. 본 연구에서는 SAE International J3016을 개량하고 경작, 살포, 수확 등 다양한 농업 운영 특성을 보다 잘 보여주기 위해 자율농업기계(ALAAM)의 자율 수준을 분류하는 방법을 제안한다. ALAAM은 직선·곡선 경로 운전, 경로·실시 운영, 운영·환경 인식, 오류 대응, 농업업무 자동화 관련 항목별 운영자 및 자율시스템 개입 현황에 따라 0(수동)~5(완전자동화) 등 6단계로 분류한, 그리고 작업 구역 계획. ALAAM 분류의 핵심은 농기계 자동화를 위한 운영자와 자율시스템 간의 상대적 역할에 기반한다. 제안된 ALAAM은 자주식 농기계의 자율주행 수준을 분류하기 위한 표준 확립을 촉진할 것으로 기대됩니다. 키워드 : 농기계, 자율기술, 자율주행, 자율주행, 자율레벨분류 도입전 세계적으로 사용자의 편의성을 확보하고 운전 조작 개입을 최소화하기 위하여 차량의 자율주행 기술에 대한 관심이 지속적으로 높아지고 있다(Jeong et al., 2019). 자율주행 기술은 효율성이 높을 뿐만 아니라 운전자의 피로, 질병 등으로 인한 주의가 필요할 때 주행의 주요 기능을 담당함으로써 안전성을 확보할 수 있다는 이점이 있다(Fagnant and Kockelman, 2015). 이러한 자율주행 기술은 4차 산업혁명에 따라 인공지능, 빅데이터, 사물 인터넷, 고성능 센서 등과 같은 요소기술들의 개발 가속화로 인해 더욱 빠르게 개발되고 있다(An and Park, 2018; Kim et al., 2020b). 이때까지 자율주행 기술은 보급 대수가 가장 많고 산업 규모가 큰 자동차 분야에 활발히 적용되어 왔으나(Han et al., 2019a), 최근 자동차뿐만 아니라 건설기계 및 농업기계 등 다양한 산업분야에 확대되어 적용 중이다(Jeong and Cho, 2020; Kim et al., 2020a). 자율주행 기술이란 직접적인 수동 물리적 제어 또는 운전자의 감시 없이도

온로드 자동차 자율 기술의 레벨 분류(SAEJ3016)입니다 온로드 자동차 자율 기술의 레벨 분류(SAEJ3016)입니다
인기글



![[싱가포르 국제학교] 스탠퍼드 아메리칸 인터내셔널 스쿨(SAIS) 영어, 수학, 생물, 화학, 물리과외 매칭 리뷰_퍼스트튜터](https://i.namu.wiki/i/8f2yNCrHdpbkYx4mE6xI2zQo_lzo7-KUFMVNAU8tePFMJ1XpgssTdRMXui7N9F_VNHD0uckV0iJZwZqcznQR5w.webp "[싱가포르 국제학교] 스탠퍼드 아메리칸 인터내셔널 스쿨(SAIS) 영어, 수학, 생물, 화학, 물리과외 매칭 리뷰_퍼스트튜터")
레벨 BAST (독일) NHTSA (미국) SAE J3016 (국제)0 드라이버만 자동화 없음 자동화 없음 1 보조 기능 고유 자동화 보조 2 부분 자동화 복합 기능 자동화 부분 자율 3고 자동화 제한부 자율주행 조건부 자동화 4 완전 자동화 완전 자율주행 고자동화 5 — 완전 자동화 레벨 BAST (독일) NHTSA (미국) SAE J3016 (국제)0 드라이버만 자동화 없음 자동화 없음 1 보조 기능 고유 자동화 보조 2 부분 자동화 복합 기능 자동화 부분 자율 3고 자동화 제한부 자율주행 조건부 자동화 4 완전 자동화 완전 자율주행 고자동화 5 — 완전 자동화
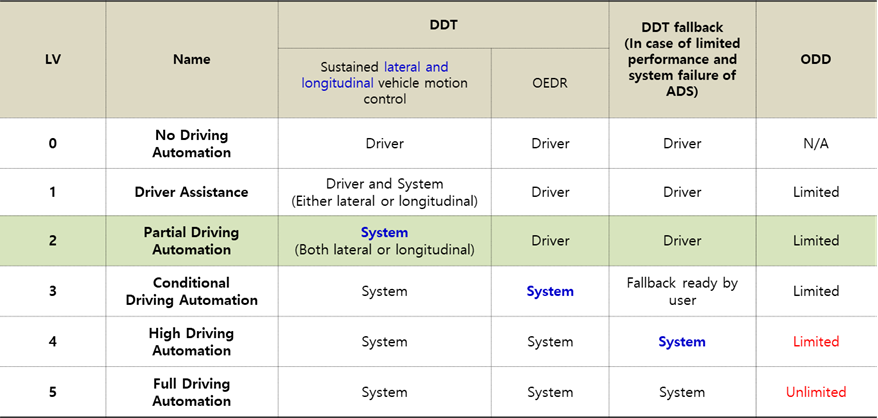
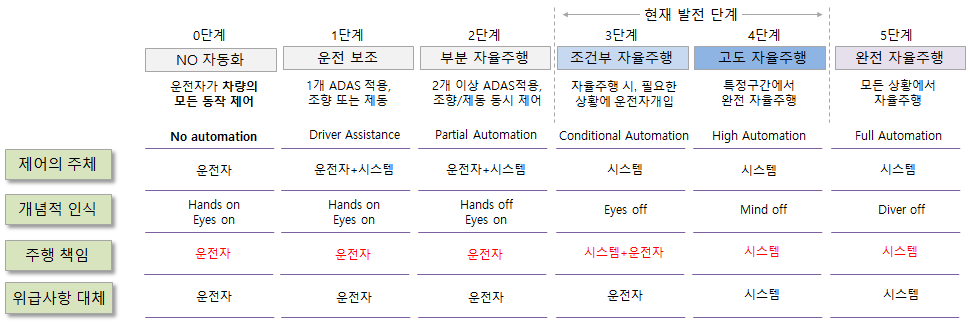
표2입니다. 도로 위 차량 자율 시스템의 수준 분류에 따른 특성입니다. 표2입니다. 도로 위 차량 자율 시스템의 레벨 분류에 따른 특성(Wevolver, 2020)입니다.

레벨 분류 012345 Term 자동화 드라이버 지원이 없습니다 부분 자동화 조건부 자동화 고도의 자동화를 실현합니다 완전 자동 제어 연산자입니다 인간/시스템 시스템의 시스템 책임을 집니다 휴먼 휴먼 휴먼 휴먼/시스템 시스템의 작동 상태 올 온 피트 오프 핸드오프 아이오프 마인드오프 올 오프입니다 레벨 분류 012345 Term 자동화 드라이버 지원이 없습니다 부분 자동화 조건부 자동화 고도의 자동화를 실현합니다 완전 자동 제어 연산자입니다 인간/시스템 시스템의 시스템 책임을 집니다 휴먼 휴먼 휴먼 휴먼/시스템 시스템의 작동 상태 올 온 피트 오프 핸드오프 아이오프 마인드오프 올 오프입니다

표 3입니다. 자동 농기계 수준별로 정보를 입력합니다. 표 3입니다. 자동 농기계 수준별로 정보를 입력합니다.
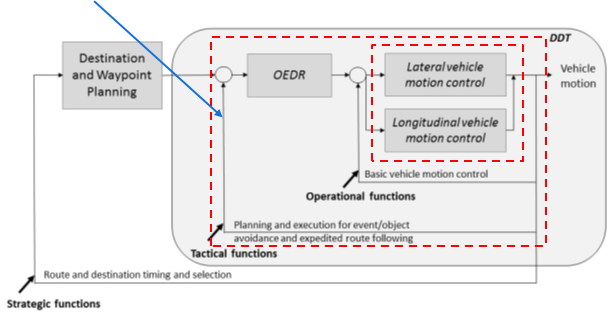
그림 1. 노상주행의 동적 운전업무를 나타내는 운전업무의 개략도(SAE International, 2016)입니다. 그림 1. 노상주행의 동적 운전업무를 나타내는 운전업무의 개략도(SAE International, 2016)입니다.
그림 2. 농기계 자율시스템의 개략도 입니다. 그림 2. 농기계 자율시스템의 개략도 입니다.
그림 3. 자율형 농기계 수준분류 입니다. 그림 3. 자율형 농기계 수준분류 입니다.
인용이 필요하신 분들은 학술연구정보서비스 riss.kr 에서 나무쿨로 검색하시면 됩니다. 인용이 필요하신 분들은 학술연구정보서비스 riss.kr 에서 나무쿨로 검색하시면 됩니다.